ComfyUI Extension: ComfyUI_depthMapOperation
Run ComfyUI workflows without the setup
No installs, no CUDA version roulette, no GPU sitting idle on your bill. Bring a workflow and run it in the browser.
A simple set of nodes to generate a point cloud from an image and its depth map, perform transformations and some basic operations.
Looking for a different extension?
Custom Nodes (0)
README
ComfyUI_depthMapOperation
A simple set of nodes to generate a point cloud from an image and its depth map, perform transformations and some basic operations.
Here an example of what can be done (not the gif, but the various rotations)
<div class="grid" align="center" markdown> <img src=".//assets/start.jpg" width=40%> <img src=".//assets/gif.gif" width=40%> </div>Installation
On the console in the custom_nodes filder execute:
git clone https://github.com/chri002/ComfyUI_depthMapOperation
Requirements
these nodes require in order to function:
- torch
- numpy
- opencv-python
- scipy
- pandas
Workflow
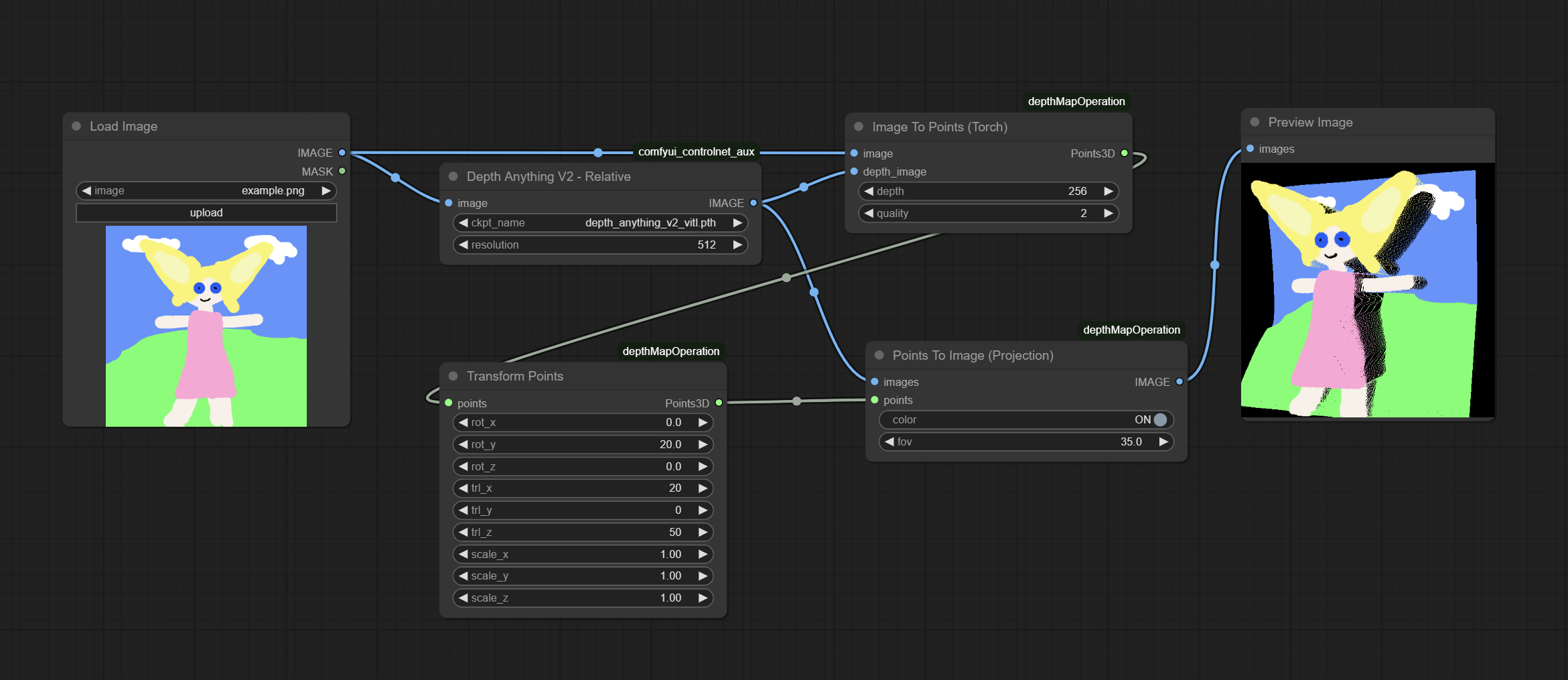
Nodes
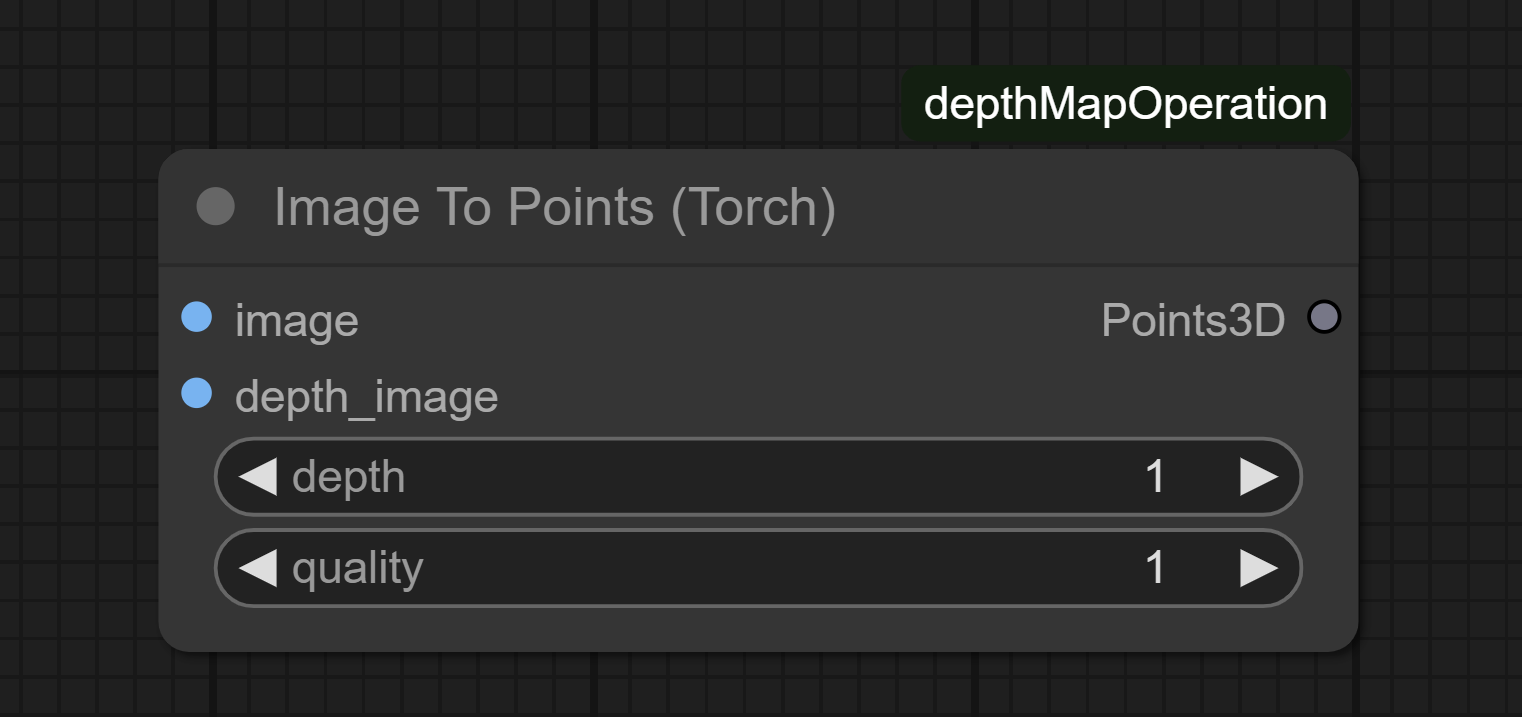
Image To Points (Torch)
Description
GPU-accelerated version using PyTorch tensors. Maintains gradient flow and supports automatic device placement.
Input Parameters:
image: Input RGB/RGBA imagedepth_image: Depth map imagedepth: Z-axis scaling factor (1-1024)quality: Downsampling quality (1=1 point:1 pixel , 16=16 interpolate points every 2 pixel)
Output:
Points3D: XYZ coordinates + RGB colors
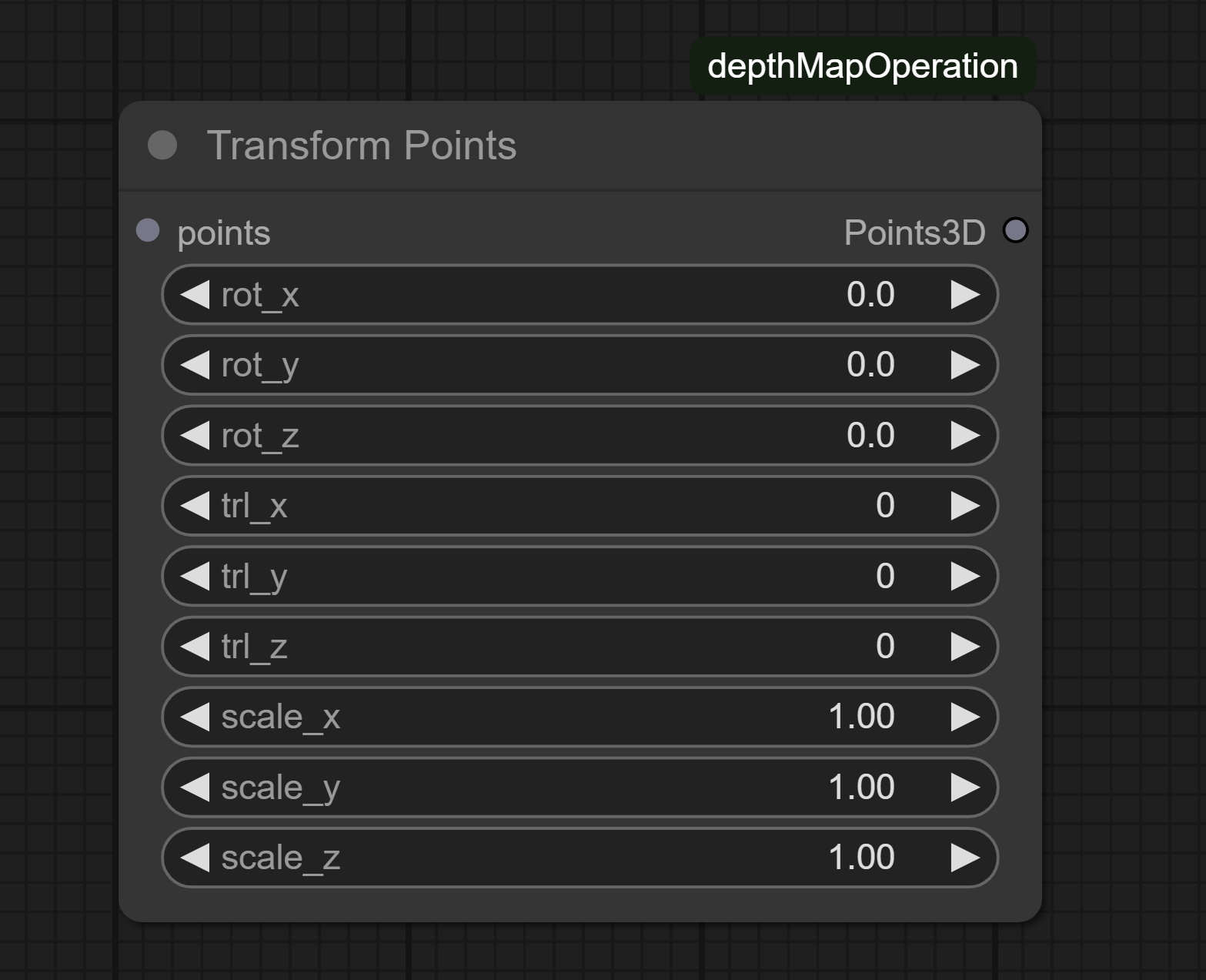
Transform Points
Description
Applies 3D transformations to point clouds (rotation, translation, scaling).
Input Parameters:
points: Input point cloud (Points3D)rot_x/y/z: Euler angles in degreestrl_x/y/z: Translation offsetsscale_x/y/z: Axis-specific scaling factors
Output:
Points3D: Transformed point cloud (XYZ coordinates + RGB colors)
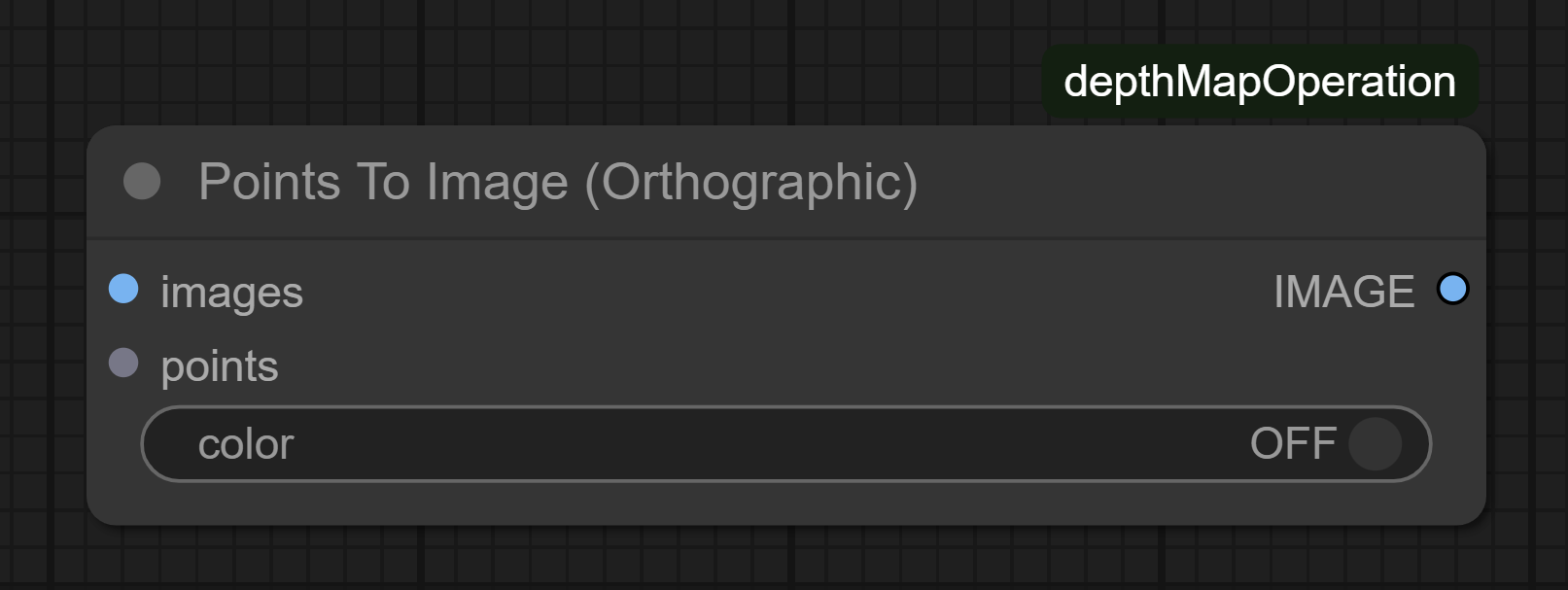
Points To Image (Orthographic)
Description
Renders 3D points to 2D image using orthographic projection.
Input Parameters:
images: Template for output dimensionspoints: Point cloud to render (Points3D)color: Enable RGB coloring
Output:
IMAGE: Rendered grayscale/RGB image
Points To Image (Projection)
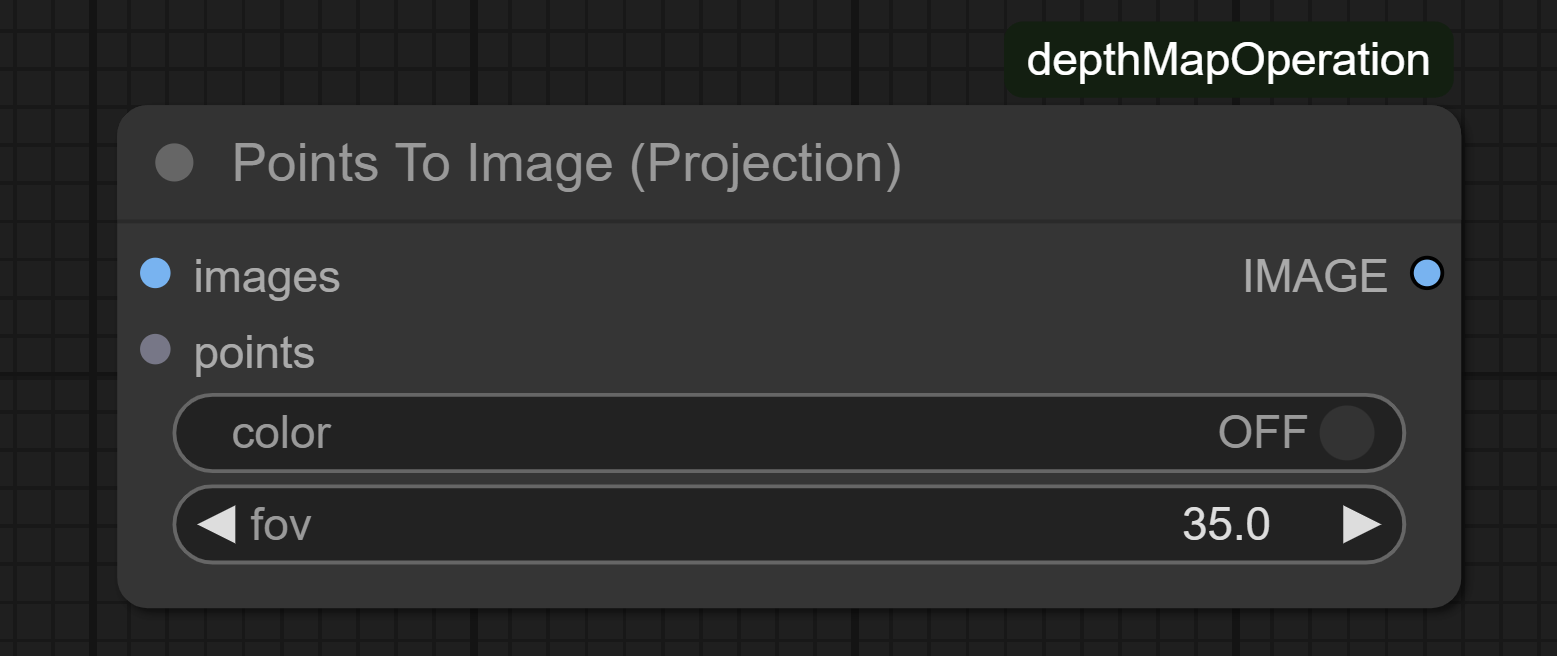
Description
Perspective projection renderer with customizable FOV.
Input Parameters:
images: Template for output dimensionspoints: Point cloud to render (Points3D)color: Enable RGB coloringfov: Field of View in degrees (1-2000)
Output:
IMAGE: Rendered grayscale/RGB image
Cube Limit
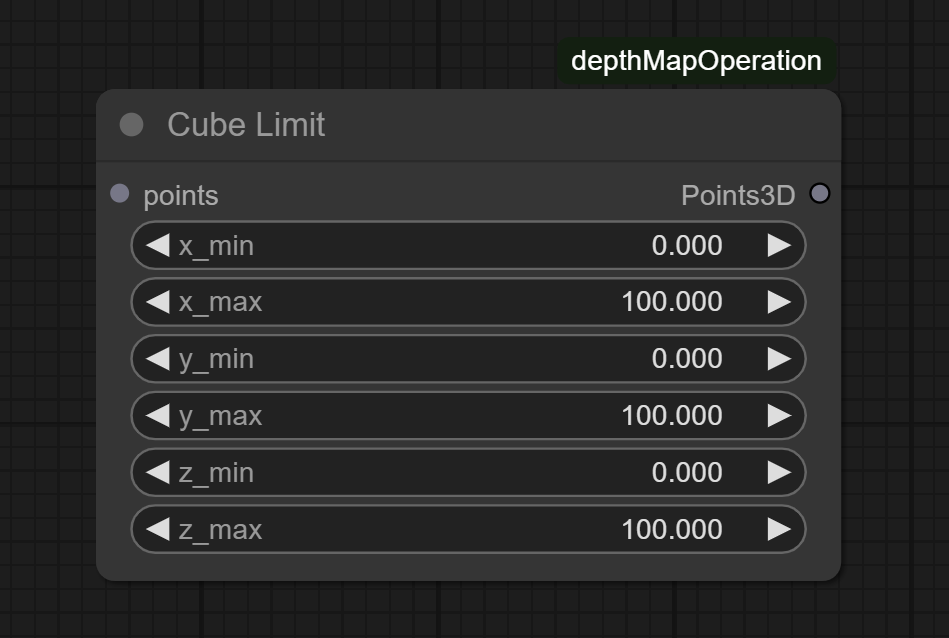
Description
Filters points within relative cube dimensions (0-100% of original bounds).
Input Parameters:
points: Point cloud to render (Points3D)- 6 axis range parameters (x_min-x_max, etc.)
Output:
Points3D: Subset of points within cube (XYZ coordinates + RGB colors)
Clean Points (KDTree)
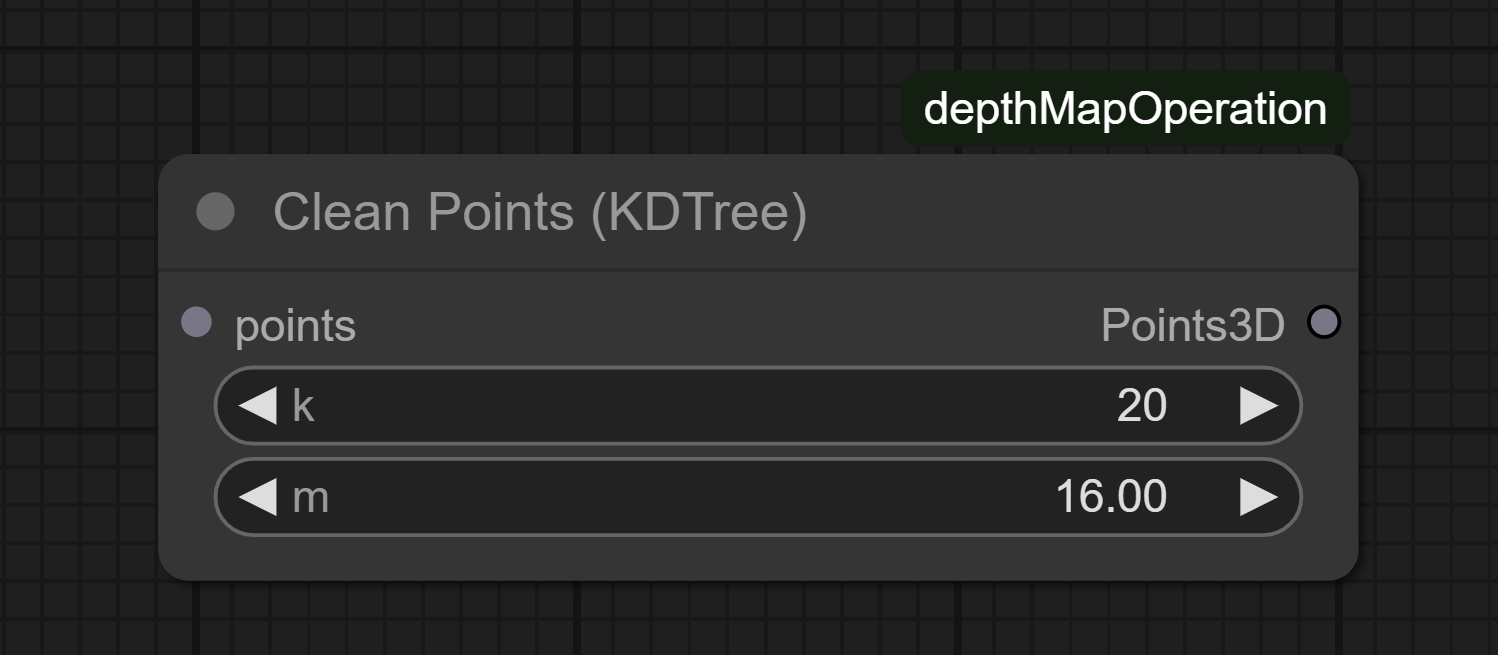
Description
Removes outliers using KDTree neighborhood analysis.
Parameters:
points: Point cloud to render (Points3D)k: Minimum neighbors requiredm: Max neighbor distance threshold
Output:
Points3D: Cleaned point cloud (XYZ coordinates + RGB colors)
Interpolate Points (KDTree)
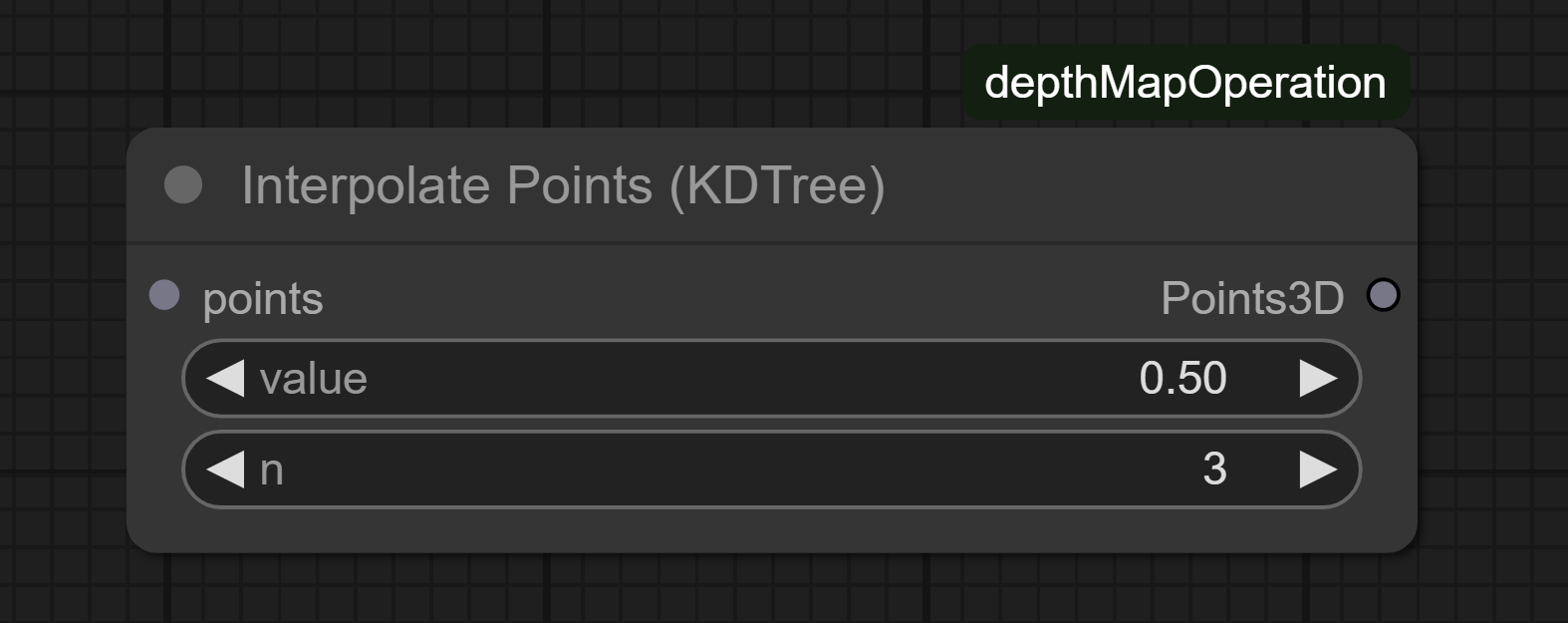
Description
Generates new points through neighborhood-based interpolation using KDTree. Enhances point cloud density in sparse regions by creating intermediate points between existing neighbors.
Input Parameters:
points: Input 3D point cloudvalue: (0-1) Blend ratio for new points (0=keep original, 1=full interpolation)n: Number of nearest neighbors to consider (0-32)
Output:
Points3D: Point cloud with added interpolated points (XYZ coordinates + RGB colors)
Export To PLY
Description
Exports point cloud to PLY format (ASCII/binary).
Input Parameters:
points: Point cloud to render (Points3D)multiple_files: Split XYZ/RGB dataformat_out: File encoding format
Import PLY
Description
Import PLY point cloud files into compatible Point3D format. (Sperimental)
Input Parameter:
.plyfile selection
Output:
Points3D: Loaded point cloud data (XYZ coordinates + RGB colors)
Cloud Points Info
Description
Displays point cloud statistics and coordinate ranges.
Output:
STRING: Formatted summary text
DEMO FUNCTIONS
<a target="_blank" href="https://colab.research.google.com/github/chri002/ComfyUI_depthMapOperation/blob/main/test.ipynb"> <img src="https://colab.research.google.com/assets/colab-badge.svg" alt="Test In Colab" height="30px"/> </a>TODO
- Fix artifacts with some extreme values
Run ComfyUI workflows without the setup
No installs, no CUDA version roulette, no GPU sitting idle on your bill. Bring a workflow and run it in the browser.